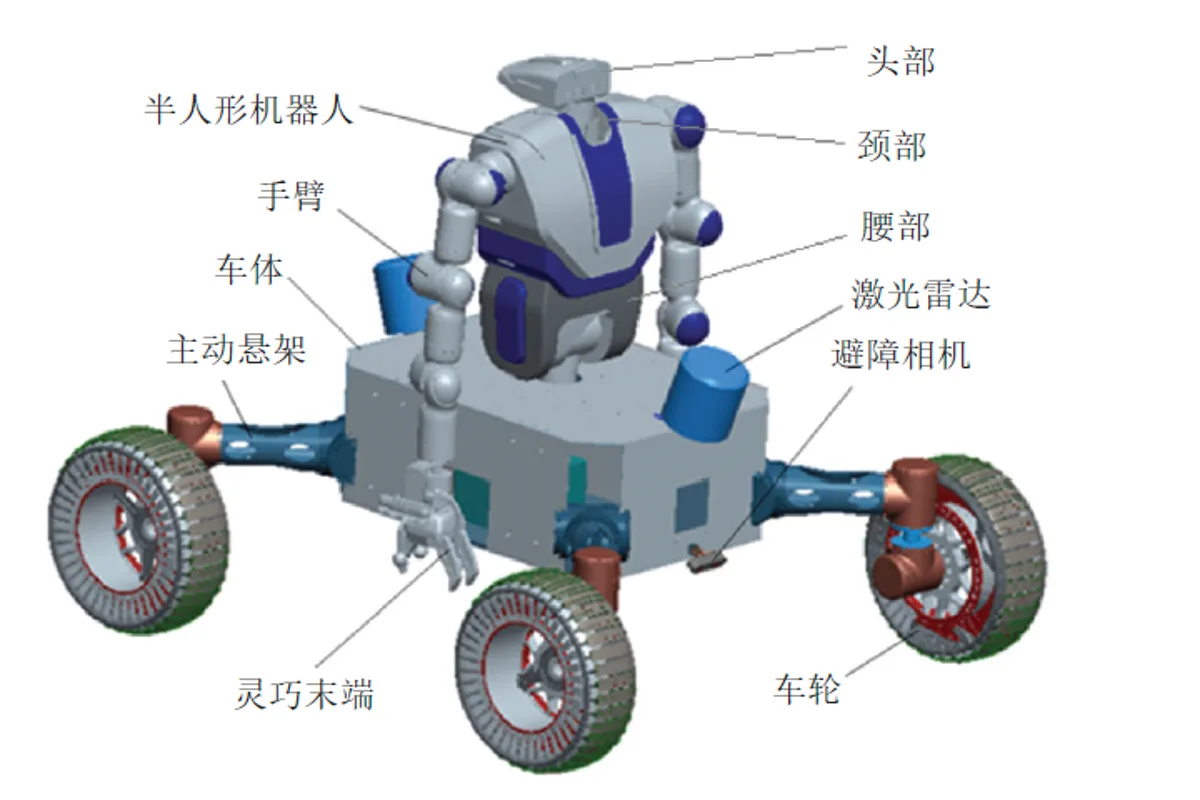
Chinese scientists have unveiled a wheeled humanoid robot designed to assist in building a research station on the Moon by 2035. The robot, developed by the Beijing Institute of Spacecraft System Engineering, is intended to perform tasks such as assembling infrastructure, transporting materials, and conducting scientific experiments before astronauts arrive.
The robot features a humanoid upper body mounted on a wheeled base, which researchers say offers greater stability and speed compared to bipedal walking robots. Its waist can rotate 180 degrees in either direction and bend forward up to 90 degrees, while its hands have four degrees of freedom for precise manipulation. The arms can rotate in seven ways, mimicking human shoulder, elbow, and wrist movements.
According to a study published in the Journal of Deep Space Exploration, the wheeled design was chosen because walking robots are mechanically complex, prone to falling, and energy-intensive. The researchers noted that China's Yutu lunar rover and Zhurong Mars rover have successfully used wheeled locomotion, making it a practical choice for long-term lunar work.

The robot is equipped with stereo cameras for depth perception and a neck that moves up, down, left, and right for a wide viewing angle. An advanced suspension system helps it maintain balance on uneven terrain with craters and loose soil. The team hopes the prototype will serve as a reference for developing equipment needed for lunar base construction.